Yard (Message Wall | contribs) No edit summary |
|||
| (26 intermediate revisions by 11 users not shown) | |||
| Line 1: | Line 1: | ||
The '''Active Mass Balance Auto-Control (AMBAC)''' is a fundamental technology that allows for thruster-less maneuvering in the zero-G environment of space by [[mobile suit]]s by means of precise movement control of their limbs. |
The '''Active Mass Balance Auto-Control (AMBAC)''' is a fundamental technology that allows for thruster-less maneuvering in the zero-G environment of space by [[mobile suit]]s by means of precise movement control of their limbs. |
||
| + | ==Overview== |
||
| − | AMBAC works by leveraging Isaac Newton's [http://en.wikipedia.org/wiki/Newton's_laws_of_motion Third Law of Motion] (When there's an action there is an equal and opposite reaction) with regard to inertia to effect changes in direction. For example, if |
+ | AMBAC works by leveraging Isaac Newton's [http://en.wikipedia.org/wiki/Newton's_laws_of_motion Third Law of Motion] (When there's an action there is an equal and opposite reaction) with regard to inertia to effect changes in direction. For example, if a pers[[File:AMBAC.jpg|thumb|An image depicting two mobile suits making use of AMBAC in combat.]]on was placed in a micro-gravity environment where friction is negligible (i.e. space), and asked to place his left arm to his chest then swing it out to the side, the resulting inertia of the arm movement would result in the rest of his body turning the other direction in order to conserve angular momentum. Then when the motion of the arm stopped, the rotation of the body would also stop. The AMBAC system coordinates movements and micro-movements precisely, allowing a continuous balance and stability without expending reaction mass. For the most part, AMBAC is invisible to the naked eye, as the shifts are slight. The system can be used to dodge incoming projectiles or small objects as the arms and legs of a [[mobile suit]] account for a significant portion of its total mass. The AMBAC system also allows the center of mass to shift outside of the body. AMBAC is by its nature limited to re-orienting the unit about its center of mass and is not a substitute for propulsion. It is often used in conjunction with the propulsion system to quickly turn the unit and shorten aiming speed as well as directing the main thrusters. The system is similar in principle to the [https://en.wikipedia.org/wiki/Reaction_wheel momentum wheel] system used in present-day satellites, though obviously more complex. Mobile suits performing AMBAC motions would presumably move similarly to present-day astronauts performing extra-vehicular activities: both typically having roughly similar body structure, their use of that mass to control their rotation would presumably be similar, even if calculated by different means. |
==[[Universal Century]]== |
==[[Universal Century]]== |
||
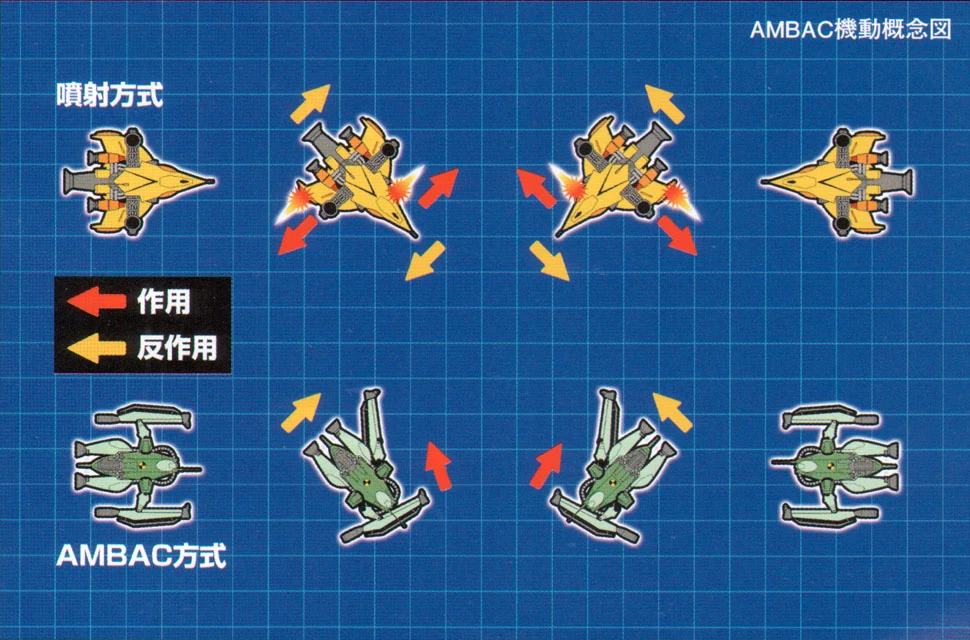
| + | [[File:Msencyclopedia 2003b.jpg|thumb|left|A comparison diagram between AMBAC and Thruster maneuvering.]]The AMBAC system was first demonstrated by the [[AMBAC Spacepod test]] made by [[Zeonic]]; the system allowed the space pod to have greater agility and fuel efficiency than [[MIP]]'s competing design, the [[MIP-X1]] mobile armor. The system was then expanded to four limbs, two arms two legs, with nearly all subsequent mobile suits. |
||
| ⚫ | |||
| − | '''Binders''' are technological instruments that provide extra control for the AMBAC systems. The idea is simple: "If four limbs can maneuver the unit better than none, why not equip them with 5 or more?" The resulting advancement is the '''tail binder'''. First equipped on [[MSN-00100 Hyaku Shiki]], the tail binder was originally used as part of the interface for the testing of the concept of transformable mobile units (the type installed on the Hyaku Shiki is not technologically advanced enough for it to be able to transform, however). The tail binder ultimately served as the fifth ''limb'' and demonstrated the usefulness of the concept. The unit performed well against more conventional mobile suits and showed superiority in manoeuvrability. [[Anaheim Electronics]] had since then installed tail binders on most of the mobile suits of the same series under '''Project Zeta''', most notably the [[MSZ-006 Zeta Gundam]]. |
||
| ⚫ | |||
| − | A cousin to the tail binder is the '''wing binder''', equipped on most transformable mobile suits with waverider mode as wings. The system made use of the wings' mobility for the transformation during mobile suit mode as AMBAC limbs and further increasing the number of '''limbs''' for the AMBAC system. The tail binder is also seen on later models of military aircraft and space fighters in U.C.0088, on the [[FF-08-GB/WR Wyvern]]. |
||
| + | '''Wing Binders''' and '''Tail Stabilator''' are technological instruments that provide extra control for the AMBAC systems. The idea is simple: "If four limbs can maneuver the unit better than none, why not equip them with 5 or more?" |
||
| + | |||
| + | The wing binders concept was first utilized on [[MSN-00100 Hyaku Shiki]] as a part of its transformation system, they were originally supposed to help the mobile suit move effectively even while it is in mobile armor form. When the Hyaku Shiki's transformation system fails, the mobile suit was retooled into a non-transformable unit and the wing binders were kept as they can serve as additional AMBAC limbs. As a result, the unit performed well against more conventional mobile suits and showed superiority in maneuverability. [[Anaheim Electronics]] had since then installed wing binders on the back of most of the mobile suits of the same series under '''Project Zeta''', most notably the [[MSZ-006 Zeta Gundam]]. |
||
| + | |||
| + | [[File:Zplusdecelerate.jpg|thumb|A Zeta Plus C1 utilizing AMBAC in conjunction with its leg thrusters to decelerate. Note the wing binders and tail stabilator mounted on the back.]] |
||
| + | |||
| + | A cousin to the wing binders is the '''tail stabilator''', an elongated binder that is also mounted on the mobile suit's back and can serve to increase the unit's AMBAC capabilities. Some variants of the tail stabilator are equipped with built-in vernier thrusters and can thus further improve a mobile suit's maneuverability. Besides being mounted on transformable mobile suit, it is also used by non-transforming units such as [[PMX-003 The O]]. The tail stabilator continues to be used on MS developed after U.C.0087, an example is the [[RGZ-91 Re-GZ]]. |
||
| + | |||
| + | ==[[Cosmic Era]]== |
||
| + | In [[Mobile Suit Gundam SEED Astray]], [[George Glenn]] utilizes AMBAC while assisting [[Kisato Yamabuki]] pilot the [[TMF/A-802 P-Mod.W BuCUE Waltfeld Custom Type]], allowing it to maneuver in space despite being land combat MS. |
||
| + | |||
| + | Although the exact term is not used, the [[GSF-YAM02 Guardshell]] MA mode can maneuver in space by movement of its three legs. |
||
==[[Anno Domini]]== |
==[[Anno Domini]]== |
||
| − | In the Anno Domini time-line, |
+ | In the Anno Domini time-line, the [[Gundam]]s (and by extension other GNMS) rely on this for their mobility in zero-g space where they lack the ability to manipulate weight using [[GN Particles]] and is vital to mobility focused mobile suits such as [[GN-001 Gundam Exia|Gundam Exia]]. |
| + | |||
| + | ==[[Advanced Generation]]== |
||
| + | Although the exact term is not used, the [[AGE-1R Gundam AGE-1 Razor]] uses inertial force generated by the weight of its massive blades for maneuvering, much like AMBAC. |
||
| + | |||
| + | ==Gallery== |
||
| + | <gallery captionalign="left"> |
||
| + | 2XDXrl3kaOaBGHhC4iYhFQ.jpg |
||
| + | </gallery> |
||
| + | |||
[[ja:AMBAC]] |
[[ja:AMBAC]] |
||
[[Category:Universal Century Technology]] |
[[Category:Universal Century Technology]] |
||
Revision as of 23:49, 9 July 2019
The Active Mass Balance Auto-Control (AMBAC) is a fundamental technology that allows for thruster-less maneuvering in the zero-G environment of space by mobile suits by means of precise movement control of their limbs.
Overview
AMBAC works by leveraging Isaac Newton's Third Law of Motion (When there's an action there is an equal and opposite reaction) with regard to inertia to effect changes in direction. For example, if a pers

{kind=link}
An image depicting two mobile suits making use of AMBAC in combat.
on was placed in a micro-gravity environment where friction is negligible (i.e. space), and asked to place his left arm to his chest then swing it out to the side, the resulting inertia of the arm movement would result in the rest of his body turning the other direction in order to conserve angular momentum. Then when the motion of the arm stopped, the rotation of the body would also stop. The AMBAC system coordinates movements and micro-movements precisely, allowing a continuous balance and stability without expending reaction mass. For the most part, AMBAC is invisible to the naked eye, as the shifts are slight. The system can be used to dodge incoming projectiles or small objects as the arms and legs of a mobile suit account for a significant portion of its total mass. The AMBAC system also allows the center of mass to shift outside of the body. AMBAC is by its nature limited to re-orienting the unit about its center of mass and is not a substitute for propulsion. It is often used in conjunction with the propulsion system to quickly turn the unit and shorten aiming speed as well as directing the main thrusters. The system is similar in principle to the momentum wheel system used in present-day satellites, though obviously more complex. Mobile suits performing AMBAC motions would presumably move similarly to present-day astronauts performing extra-vehicular activities: both typically having roughly similar body structure, their use of that mass to control their rotation would presumably be similar, even if calculated by different means.
Universal Century
{kind=link}
A comparison diagram between AMBAC and Thruster maneuvering.
The AMBAC system was first demonstrated by the AMBAC Spacepod test made by Zeonic; the system allowed the space pod to have greater agility and fuel efficiency than MIP's competing design, the MIP-X1 mobile armor. The system was then expanded to four limbs, two arms two legs, with nearly all subsequent mobile suits.
Wing Binders and Tail Stabilator
Wing Binders and Tail Stabilator are technological instruments that provide extra control for the AMBAC systems. The idea is simple: "If four limbs can maneuver the unit better than none, why not equip them with 5 or more?"
The wing binders concept was first utilized on MSN-00100 Hyaku Shiki as a part of its transformation system, they were originally supposed to help the mobile suit move effectively even while it is in mobile armor form. When the Hyaku Shiki's transformation system fails, the mobile suit was retooled into a non-transformable unit and the wing binders were kept as they can serve as additional AMBAC limbs. As a result, the unit performed well against more conventional mobile suits and showed superiority in maneuverability. Anaheim Electronics had since then installed wing binders on the back of most of the mobile suits of the same series under Project Zeta, most notably the MSZ-006 Zeta Gundam.


{kind=link}
A Zeta Plus C1 utilizing AMBAC in conjunction with its leg thrusters to decelerate. Note the wing binders and tail stabilator mounted on the back.
A cousin to the wing binders is the tail stabilator, an elongated binder that is also mounted on the mobile suit's back and can serve to increase the unit's AMBAC capabilities. Some variants of the tail stabilator are equipped with built-in vernier thrusters and can thus further improve a mobile suit's maneuverability. Besides being mounted on transformable mobile suit, it is also used by non-transforming units such as PMX-003 The O. The tail stabilator continues to be used on MS developed after U.C.0087, an example is the RGZ-91 Re-GZ.
Cosmic Era
In Mobile Suit Gundam SEED Astray, George Glenn utilizes AMBAC while assisting Kisato Yamabuki pilot the TMF/A-802 P-Mod.W BuCUE Waltfeld Custom Type, allowing it to maneuver in space despite being land combat MS.
Although the exact term is not used, the GSF-YAM02 Guardshell MA mode can maneuver in space by movement of its three legs.
Anno Domini
In the Anno Domini time-line, the Gundams (and by extension other GNMS) rely on this for their mobility in zero-g space where they lack the ability to manipulate weight using GN Particles and is vital to mobility focused mobile suits such as Gundam Exia.
Advanced Generation
Although the exact term is not used, the AGE-1R Gundam AGE-1 Razor uses inertial force generated by the weight of its massive blades for maneuvering, much like AMBAC.
Gallery
")